
Luogo di origine:
La Cina
Marca:
YOUNGYOU
Certificazione:
CE RoHS
Numero di modello:
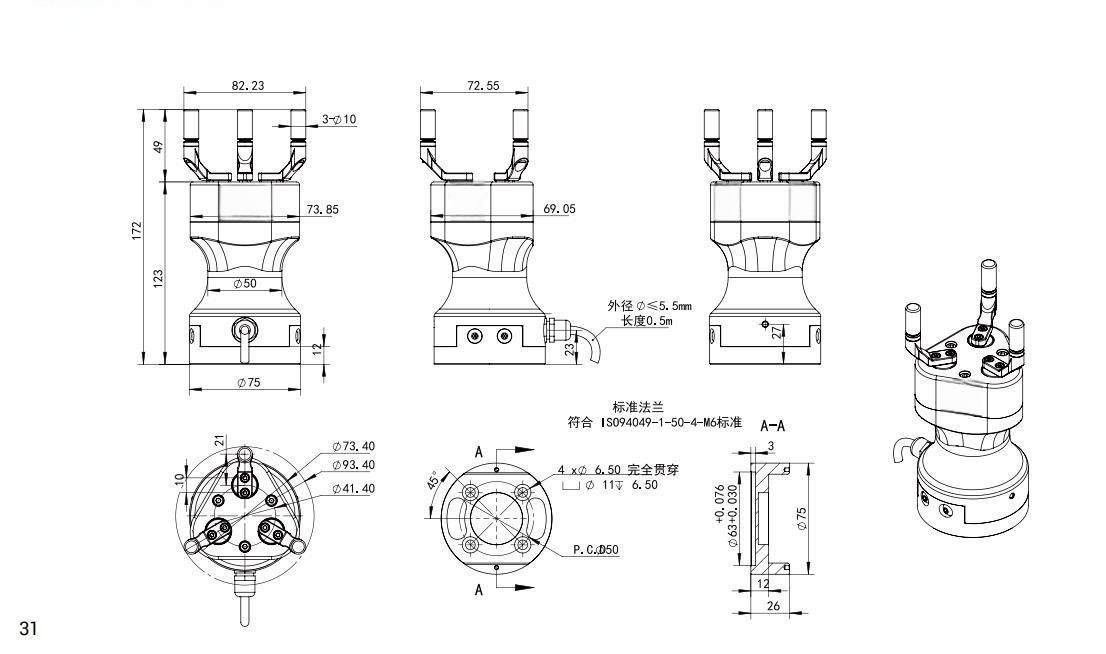
RCG90-065
Contatto Stati Uniti

Pinza di presa robot del braccio della pinza di presa programmabile per la pinza di presa economica della mano di braccio del robot del robot
Caratteristica
La caratteristica di un meccanismo concentrante e di pressione è che il posizionamento e premere sono completati dalle stesse (o gruppo di) componenti, cioè, facendo uso di questa componente all'approccio (o ritirarsi) un determinato asse o aereo simmetrico ad una velocità costante, o usando la deformazione elastica uniforme della componente per completare il posizionamento, premente, o allentante del pezzo in lavorazione. dovuto l'uso di un dispositivo di serraggio concentrante, dell'asse simmetrico, dell'aereo, o della linea centrale è il riferimento di posizionamento per il pezzo in lavorazione, che può impedire lo spostamento del riferimento e del risultato di posizionamento nell'errore zero di spostamento del riferimento. Se l'asse simmetrico, aereo, o linea centrale è inoltre il riferimento trattato del pezzo in lavorazione, quindi il riferimento di posizionamento coincide con il riferimento trattato. Se il riferimento non coincide, l'errore è zero e l'errore di posizionamento totale è zero. È precisamente dovuto queste caratteristiche che il riferimento di posizionamento del pezzo in lavorazione rimane identicamente e non produce lo spostamento, così raggiungendo la funzione di concentrare e di pressione. Di conseguenza, il meccanismo concentrante e di pressione è pricipalmente applicabile al posizionamento ed alla pressione dei pezzi in lavorazione con la simmetria geometrica e basati sull'asse, sull'aereo, o sulla linea centrale simmetrico come il riferimento trattato.
Circa la società
La nostra ferrovia di guida ha cooperato con molte marche ben note internazionali del robot, quale ABB KUKA FANUC Yaskawa UR. Le società coinvolgere pricipalmente comprendono il trasporto con palette, il carico e lo scarico. Il carico delle gamme della ferrovia di guida da 500kg a 5000kg. La lunghezza della ferrovia di guida è personalizzata secondo i bisogni dei clienti. Abbiamo discusso un caso che un robot di ABB IRB6700 corrisponde a 20 macchine di CNC e una ferrovia di guida lunga 50m completa il moto alternativo, caricante e scaricante del robot. Il numero dei robot notevolmente è ridotto ed il costo di integrazione è conservato.
La nostra società inoltre offre i robot industriali ai prezzi molto favorevoli per ordinare insieme ai prezzi più bassi.
Benvenuto a Shanghai, Cina, studiare i nostri robot e rotaie!
Rifornimento di prodotto della società
Robot di ABB
Robot di KUKA
Robot di Yaskawa
Robot di Fanuc
Robot di UR
Cobot
Ferrovia di guida
Cobot ha fatto in Cina
Specifiche di prodotto
| Codice di ordine |
RCG90-065-0L#-C0024-P40-A
|
| Diametro di pressione massimo raccomandato |
90 millimetri
|
| Singolo dito che preme forza | 65N |
| Ripetibilità posizionale | ±0.02 millimetro |
| carico raccomandato *Maximum | 2 chilogrammi |
| È di sostegno | Supporto |
| Ambiente di uso | 5-40 ℃, inferiore al RH di 85% |
| Rumore di funzionamento | dB <40 |
| Peso corporeo | 1 chilogrammo |
| GRADO DEL IP | IP 40 |
| Tensione nominale | CC 24±10 V |
| Corrente massima | 1,5 A |
| Corrente nominale | 0,45 A |
| Protocollo di comunicazione | Modbus RTU (RS 485) |
| Risponde alle norme internazionali | CE, RoHS |
Tavola di parametri del prodotto
![]()
![]()
![]()
Imballaggio e trasporto
![]()
![]()
Invii la vostra indagine direttamente noi

