
Luogo di origine:
La Cina
Marca:
YOUNGYOU
Certificazione:
CE RoHS
Numero di modello:
RG52-050
Contatto Stati Uniti

Le pinze di presa elettriche hanno usato direttamente insieme con i robot di collaborazione. Colpo: 0-52mm
Caratteristiche di prodotto
1. Controllo di alta precisione: La servo pinza di presa elettrica ha capacità di alta precisione di controllo di posizione e di controllo della forza e può regolare la forza e la posizione di pressione come stata necessaria.
2. risposta ad alta velocità: La velocità di risposta di servo pinza di presa elettrica è molto veloce, che può raggiungere le operazioni di pressione e d'allentamento veloci, migliorando l'efficienza di produzione.
3. controllo programmabile: Controllo programmabile della servo pinza di presa elettrica, che può fissare le forze e le posizioni di pressione differenti come necessario adattarsi agli scenari di lavoro differenti.
4. consumo di energia basso: La servo pinza di presa elettrica adotta la tecnologia di controllo elettronico e di clic efficiente, che può risparmiare l'energia e ridurre i costi di produzione.
Composizione strutturale
La servo pinza di presa elettrica pricipalmente consiste di seguenti componenti:
1. premere parte: La parte di pressione è la componente più importante di servo pinza di presa elettrica, usata per premere gli oggetti. La parte di pressione consiste solitamente di due o più ganasce, che sono fatte solitamente di metallo. Alcune ganasce sono ricoperte di strato di di gomma o di di plastica sulla superficie per aumentare la pressione dell'attrito.
2. sezione di clic: Il clic di servo pinze di presa elettriche è solitamente una macchina efficiente del punto di CC che può raggiungere il controllo di posizione ad alta velocità e di alta precisione ed il controllo di forza.
3. sistema di controllo: Il sistema di controllo è la componente del centro di servo pinza di presa elettrica, responsabile del controllo la forza e della posizione di pressione. Un sistema di controllo consiste tipicamente di uno o più regolatori elettronici, sensori ed azionatori.
4. struttura meccanica: La struttura meccanica è la struttura di servo pinza di presa elettrica, responsabile dell'appoggio della parte di pressione, cliccando la parte ed il sistema di controllo. Le strutture meccaniche sono fatte solitamente della lega o dell'acciaio di alluminio, con ad alta resistenza e rigidezza.
Circa la società
La nostra ferrovia di guida ha cooperato con molte marche ben note internazionali del robot, quale ABB KUKA FANUC Yaskawa UR. Le società coinvolgere pricipalmente comprendono il trasporto con palette, il carico e lo scarico. Il carico delle gamme della ferrovia di guida da 500kg a 5000kg. La lunghezza della ferrovia di guida è personalizzata secondo i bisogni dei clienti. Abbiamo discusso un caso che un robot di ABB IRB6700 corrisponde a 20 macchine di CNC e una ferrovia di guida lunga 50m completa il moto alternativo, caricante e scaricante del robot. Il numero dei robot notevolmente è ridotto ed il costo di integrazione è conservato.
La nostra società inoltre offre i robot industriali ai prezzi molto favorevoli per ordinare insieme ai prezzi più bassi.
Benvenuto a Shanghai, Cina, studiare i nostri robot e rotaie!
Rifornimento di prodotto della società
Robot di ABB
Robot di KUKA
Robot di Yaskawa
Robot di Fanuc
Robot di UR
Cobot
Ferrovia di guida
Cobot ha fatto in Cina
Specifiche di prodotto
| Codice di ordine |
RG52-050-0L#-C1024-P54-A
|
| Colpo regolabile | 0-52 millimetri |
| Singolo dito che preme forza |
2-50 N
|
| Tempo di chiusura/di apertura | 0,65 s |
| Ripetibilità posizionale | ±0.02 millimetro |
| carico raccomandato *Maximum | 1 chilogrammo |
| È di sostegno | Supporto |
| Ambiente di uso | 5-40 ℃, inferiore al RH di 85% |
| Rumore di funzionamento | dB <40 |
| Peso corporeo | 0,75 chilogrammi |
| GRADO DEL IP | IP 40 |
| Tensione nominale | DC 24±10% V |
| Corrente massima | 0,8 A |
| Corrente nominale | 0,5 A |
| Protocollo di comunicazione | Modbus RTU (RS 485), ingresso/uscita digitale facoltativo |
| Risponde alle norme internazionali | CE, RoHS |
| Carico statico permissibile verticale Fz | 200N |
| Momento statico permissibile del MX del cursore | 2,5 N·m. |
| Momento statico permissibile del cursore mio | 2 N·m. |
| Momento statico permissibile MZ del cursore | 2,8 N·m. |
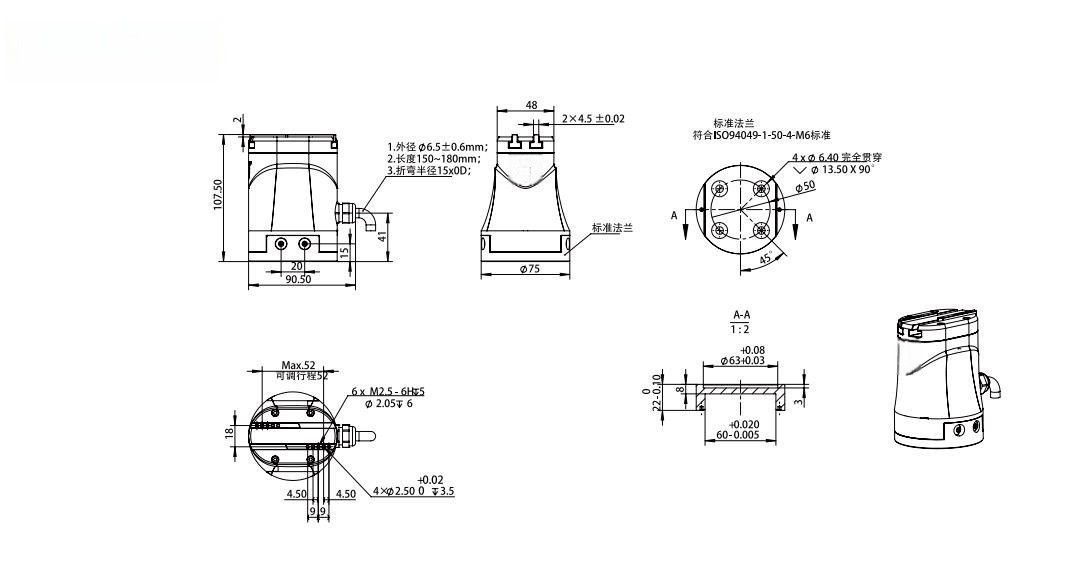
Tavola di parametri del prodotto
![]()
![]()
Imballaggio e trasporto
![]()
![]()
Invii la vostra indagine direttamente noi

