
Luogo di origine:
La Cina
Marca:
YOUNGYOU
Certificazione:
CE
Numero di modello:
PY4030U-050
Contatto Stati Uniti
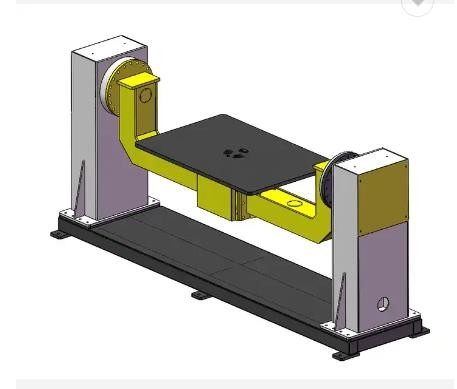




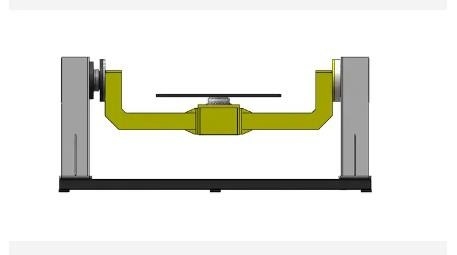
Fatto in posizionatore di saldatura biassiale del carico 100-1000kg di asse della piattaforma girevole 380v 50-60hz della porcellana 1200*1200
Navigazione di riflessione e tecnologia leggere di posizionamento per i robot mobili
La navigazione leggera tipica della riflessione che posiziona il metodo principale utilizzazione il laser o i sensori infrarossi per variare. Laser e infrarosso sia usare tecnologia leggera di riflessione per navigazione che posizionare.
Il sistema di posizionamento globale del laser consiste generalmente di un meccanismo di rotazione del laser, di un riflettore, di un dispositivo di ricezione optoelettronico e di un dispositivo di trasmissione e dell'acquisizione dei dati.
Durante il funzionamento, il laser è emesso esternamente attraverso un meccanismo dello specchio rotante. Nell'esplorare un punto di riferimento cooperativo composto di riflettore a rovescio, la luce riflessa è elaborata da un ricevitore fotoelettrico come segnale di rilevazione. Il programma dell'acquisizione dei dati è iniziato per leggere i dati del disco di codice del meccanismo di rotazione (il valore misurato di angolo dell'obiettivo) e poi è trasmesso al computer superiore per elaborazione dei dati con la comunicazione. Sulla base della posizione conosciuta del punto di riferimento e delle informazioni individuate, la posizione attuale e la direzione del sensore nel sistema di coordinate del punto di riferimento possono essere calcolate per raggiungere l'ulteriori navigazione e posizionamento.
La gamma del laser presenta i vantaggi del fascio stretto, buon parallelismo, piccoli scattering e di alta risoluzione nella direzione di gamma, ma inoltre notevolmente è colpita dai fattori ambientali. Di conseguenza, come a denoise il segnale raccolto quando usando la gamma del laser è inoltre una sfida importante. Inoltre, il laser che varia anche ha angoli morti, rendente lo difficile raggiungere la navigazione e posizionanti solamente dal laser. Nelle applicazioni industriali, generalmente, è ancora ampiamente usato nella prova in loco industriale all'interno di una gamma specifica, come rilevazione delle crepe della conduttura.
La tecnologia di percezione infrarossa è usata spesso nei multi sistemi uniti di superamento degli ostacoli del robot formare un'ampia area del robot «pelle sensibile» che riguarda la superficie del braccio del robot e può individuare i vari oggetti incontrati dal braccio del robot durante il funzionamento.
Un sensore infrarosso tipico include un diodo a emissione luminosa semi conduttore che può emettere la luce infrarossa e un diodo fotosensibile semi conduttore che serve da ricevitore. Il segnale modulato è emesso da un tubo luminescente infrarosso ed il tubo fotosensibile infrarosso riceve il segnale modulato infrarosso riflesso dall'obiettivo. L'eliminazione di interferenza infrarossa ambientale è assicurata da modulazione del segnale e da un filtro infrarosso dedicato. Se il Vo del segnale in uscita rappresenta l'uscita di tensione dell'intensità della luce della luce riflessa, quindi il Vo è una funzione della distanza fra la sonda ed il pezzo in lavorazione: Vo=f (x, p), dove la p è il coefficiente di riflessione del pezzo in lavorazione. La P è collegata con il colore e la rugosità di superficie dell'oggetto dell'obiettivo. X - distanza fra la sonda ed il pezzo in lavorazione.
Quando il pezzo in lavorazione è un obiettivo dello stesso tipo con lo stesso valore p, la x ed il Vo corrispondono di valore univoco. La X può essere ottenuta interpolando i dati sperimentali delle misure di prossimità di vari oggetti dell'obiettivo. In questo modo, la distanza fra il robot e l'oggetto dell'obiettivo può essere misurata facendo uso dei sensori infrarossi ed altri metodi di elaborazione delle informazioni possono anche essere usati per traversare ed individuare il robot mobile.
Sebbene il posizionamento di percezione infrarosso anche presenti i vantaggi quali l'alta sensibilità, la struttura semplice ed il basso costo, dovuto la loro risoluzione dell'angolo alto e la risoluzione bassa di distanza, sono comunemente usati come sensori di prossimità in robot mobili individuare l'avvicinamento o gli ostacoli improvvisi del movimento, facilitanti la fermata di emergenza dei robot.
![]()
Circa la società
La nostra ferrovia di guida ha cooperato con molte marche ben note internazionali del robot, quale ABB KUKA FANUC Yaskawa UR. Le società coinvolgere pricipalmente comprendono il trasporto con palette, il carico e lo scarico. Il carico delle gamme della ferrovia di guida da 500kg a 5000kg. La lunghezza della ferrovia di guida è personalizzata secondo i bisogni dei clienti. Abbiamo discusso un caso che un robot di ABB IRB6700 corrisponde a 20 macchine di CNC e una ferrovia di guida lunga 50m completa il moto alternativo, caricante e scaricante del robot. Il numero dei robot notevolmente è ridotto ed il costo di integrazione è conservato.
La nostra società inoltre offre i robot industriali ai prezzi molto favorevoli per ordinare insieme ai prezzi più bassi.
Benvenuto a Shanghai, Cina, studiare i nostri robot e rotaie!
Rifornimento di prodotto della società
Robot di ABB
Robot di KUKA
Robot di Yaskawa
Robot di Fanuc
Robot di UR
Cobot
Ferrovia di guida
Cobot ha fatto in Cina
Specifiche di prodotto
Tavola di parametri del prodotto


Imballaggio e trasporto
![]()
![]()
Invii la vostra indagine direttamente noi




