
Luogo di origine:
La Cina
Marca:
YOUNGYOU
Certificazione:
CE
Numero di modello:
GBS6-C1400
Contatto Stati Uniti

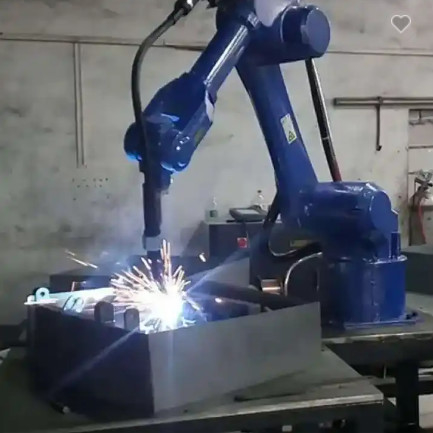

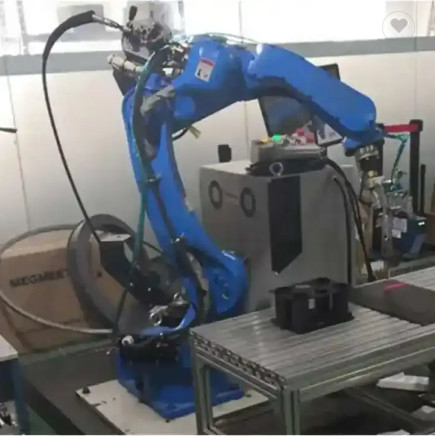

Un robot per saldatura automatico di 6 assi con la saldatrice elettrica di CHD MIG 500 ed il posizionatore di saldatura
Tecnologia ultrasonica di posizionamento e di navigazione per i robot mobili
Posizionare e di navigazione ultrasonica il principio di lavoro è inoltre simile a quello del laser e dell'infrarosso. Solitamente, le onde ultrasoniche sono emesse dalla sonda dell'emissione del sensore ultrasonico e dagli ostacoli di incontro delle onde ultrasoniche nel medium e ritornare al dispositivo di ricezione.
Ricevendo il segnale ultrasonico della riflessione emesso da sè e calcolando la distanza S della propagazione basata sulla differenza di tempo fra l'emissione e la ricezione ultrasoniche di eco come pure la velocità della propagazione, la distanza fra l'ostacolo e il robot può essere ottenuta. C'è una formula: S=Tv/2, dove T - la differenza di tempo fra l'emissione ultrasonica e ricezione; V - la velocità delle onde ultrasoniche che si propagano nel medium.
Naturalmente, c'è inoltre molto navigazione del robot mobile e posizionando le tecnologie che utilizzano i dispositivi separati di ricezione e di trasmissione. I dispositivi di ricezione multipli sono sistemati nella mappa ambientale, mentre le sonde di trasmissione sono installate sul robot mobile.
Nella navigazione e nel posizionamento dei robot mobili, dovuto i difetti inerenti dei sensori ultrasonici, quali la riflessione di specchio e l'angolo d'apertura limitato, è difficile completamente da ottenere l'informazione ambientale circostante. Di conseguenza, i sistemi di percezione ultrasonici composti di sensori multipli sono usati solitamente per stabilire i modelli ambientali corrispondenti e le informazioni raccolte dai sensori sono trasmesse al sistema di controllo del robot mobile con la comunicazione di serie, il sistema di controllo poi usa determinati algoritmi per elaborare i dati corrispondenti basati sui segnali raccolti e sul modello matematico stabilito ottenere le informazioni dell'ambiente di posizione del robot.
dovuto i vantaggi di basso costo, del tasso veloce della raccolta di informazioni e di alta risoluzione di distanza, i sensori ultrasonici lungamente sono stati ampiamente usati nella navigazione e nel posizionamento dei robot mobili. Inoltre, non richiede la tecnologia complessa dell'attrezzatura di immagine quando raccoglie l'informazione ambientale, con conseguente velocità di gamma veloce e buona prestazione in tempo reale.
Allo stesso tempo, i sensori ultrasonici sono inoltre meno suscettibili delle condizioni ambientali esterne quali le condizioni atmosferiche, la luce ambientale, le ombre di ostacolo e la rugosità di superficie. La navigazione di ultrasuono e posizionare sono stati ampiamente usati in vari sistemi di percezione dei robot mobili.
![]()
Circa la società
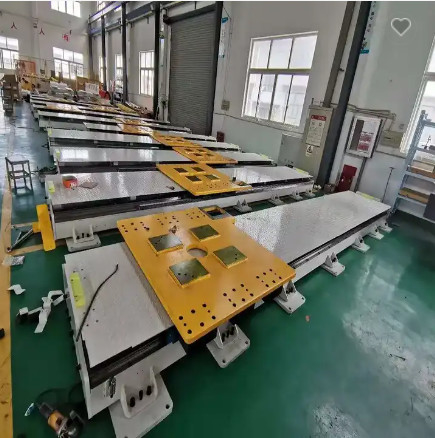
La nostra ferrovia di guida ha cooperato con molte marche ben note internazionali del robot, quale ABB KUKA FANUC Yaskawa UR. Le società coinvolgere pricipalmente comprendono il trasporto con palette, il carico e lo scarico. Il carico delle gamme della ferrovia di guida da 500kg a 5000kg. La lunghezza della ferrovia di guida è personalizzata secondo i bisogni dei clienti. Abbiamo discusso un caso che un robot di ABB IRB6700 corrisponde a 20 macchine di CNC e una ferrovia di guida lunga 50m completa il moto alternativo, caricante e scaricante del robot. Il numero dei robot notevolmente è ridotto ed il costo di integrazione è conservato.
La nostra società inoltre offre i robot industriali ai prezzi molto favorevoli per ordinare insieme ai prezzi più bassi.
Benvenuto a Shanghai, Cina, studiare i nostri robot e rotaie!
Rifornimento di prodotto della società
Robot di ABB
Robot di KUKA
Robot di Yaskawa
Robot di Fanuc
Robot di UR
Cobot
Ferrovia di guida
Cobot ha fatto in Cina
Specifiche di prodotto
Tavola di parametri del prodotto
![]()
![]()
![]()
![]()
Imballaggio e trasporto
![]()
![]()
Invii la vostra indagine direttamente noi

