

2023-07-12
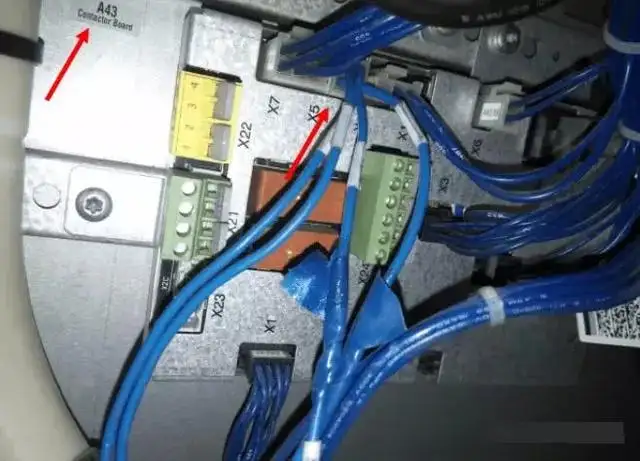
2. Trattamento dell'errore di cortocircuito del bordo di cortocircuito del modulo di potere del robot di ABB
Fattori umani: L'hardware di scambio caldo è molto pericoloso e molti guasti del circuito sono causati dallo scambio caldo. L'uso della forza improprio quando inserisce le carte e le spine con potere può danneggiare le interfacce, chip, ecc., conducenti per danneggiamento del circuito del robot; Poichè il periodo di usando gli aumenti dei robot, le componenti sul circuito del robot invecchieranno naturalmente, conducendo ai guasti del circuito del robot.
Fattori ambientali: dovuto manutenzione impropria dall'operatore, il circuito del robot è coperto di polvere, che può causare i cortocircuiti del segnale.
3. Quando è necessario ai robot industriali di sostegno
Dopo il primo potere sopra di nuova macchina.
Prima di apportare qualsiasi modifiche.
3. Dopo il completamento delle modifiche.
4. Se i robot industriali sono importanti, dovrebbero essere fatti una volta alla settimana in maniera regolare.
5. È meglio da fare un backup sull'unità USB pure.
6. cancelli regolarmente i vecchi backup per liberare lo spazio su disco rigido.
4. Come trattare la situazione dove il robot è acceso ed il pendente d'istruzione continua visualizzare la seguente interfaccia
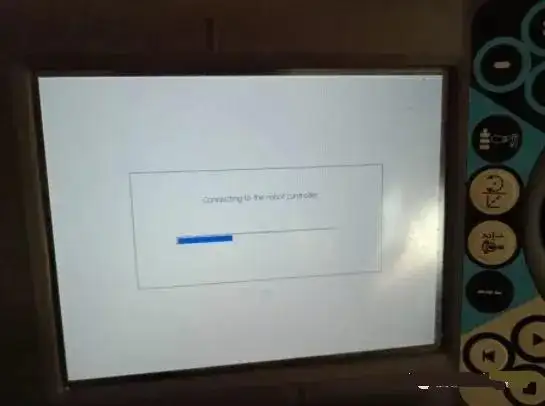 La situazione di cui sopra è che non c'è il collegamento di comunicazione stabilito fra il pendente d'istruzione ed il regolatore principale del robot e le ragioni per l'instaurazione del collegamento per includere:
La situazione di cui sopra è che non c'è il collegamento di comunicazione stabilito fra il pendente d'istruzione ed il regolatore principale del robot e le ragioni per l'instaurazione del collegamento per includere:
1. L'ospite del robot è difettoso.
2. La carta incorporata dei CF (carta di deviazione standard) dell'ospite del robot è difettosa.
3. Il cavo della rete fra il pendente d'istruzione e l'ospite è sciolto, ecc.
Metodo di lavorazione: 1. Controlli se l'ospite è normale e se la carta di deviazione standard nell'ospite è normale.
2. Controlli se il cavo della rete dal pendente d'istruzione all'ospite è collegato correttamente.
5. Che cosa è il significato del ricordo di tempo di manutenzione 10106 quando il robot visualizza un messaggio di allarme?
Questa situazione è un ricordo intelligente di manutenzione periodica del robot di ABB.
6. Come trattare una disfunzione del sistema quando il robot entra in un acceso?
1. Rimetta in moto una volta il robot.
Se non, controllo il pendente d'istruzione per i richiami più dettagliati dell'allarme ed agire.
3. nuovo inizio.
4. Se ancora non può essere liberato, partenza di prova B.
5. Se ancora non funziona, provi prego la partenza di P.
6. Se ancora non funziona, provimi prego la partenza (questo restituirà il robot alle sue regolazioni della fabbrica, starà attento).
7. Può il backup del robot essere diviso dai robot multipli?
No. per esempio, il backup del robot A può essere usato soltanto per il robot A, non per il robot B o C, mentre questo può causare i guasti del sistema.
8. Che archivi possono essere divisi nel backup del robot?
Se due robot sono dello stessi modello e configurazione. Potete dividere il programma RAPIDO e l'archivio di EIO, ma dopo la divisione, inoltre deve essere verificata prima che possa essere usata normalmente.
9. Che cosa è l'origine meccanica dei robot? Dove è l'origine meccanica?
Ciascuno dei sei servomotori del robot ha un'origine meccanica fissa unica. La regolazione sbagliata dell'origine meccanica del robot causerà i problemi quale movimento limitato o sbagliato del robot, dell'incapacità camminare in una linea retta e del serio danno al robot.
10. Come rimuovere l'allarme del monitoraggio di azione del robot 50204?
1. Modifichi i parametri del monitoraggio di azione del robot (nel menu del monitoraggio di azione del pannello di controllo) per abbinare la situazione reale.
2. Usi il comando di AccSet ridurre l'accelerazione del robot.
3. riduca la v nel data_ della velocità l'opzione della putrefazione.
11. Come trattare l'allarme «50296, differenza di dati di memoria di SMB» quando il robot è alimentato sopra per la prima volta?
1. Calibratura scelta dal menu principale di ABB.
2. clicchi sopra ROB_ 1. entrano nello schermo di calibratura e nella memoria scelta di SMB.
3. «avanzati» scelti, entrano e cliccano «nella chiara memoria del Governo di controllo».
4. Dopo il completamento, clicchi «vicino» e poi clicchi «l'aggiornamento».
5. “gabinetto di controllo scambiato scelto o braccio robot, aggiornante il gabinetto di controllo con i dati di memoria di SMB”.
12. Come personalizzare la velocità di moto di traiettoria del robot nel programma RAPIDO?
1. Dati scelti di programma dal menu principale del pendente d'istruzione.
2. Dopo l'individuazione del tipo di dati Speeddata, clicchi nuovo.
3. clicchi sopra il valore iniziale ed i significati delle quattro variabili Speeddata sono: il v_ TCP rappresenta la velocità di marcia lineare del robot, putrefazione del v_ rappresenta la velocità di rotazione del robot, v_ Leax rappresenta la velocità di funzionamento lineare dell'asse esterno, v_ Reax rappresenta la velocità di rotazione dell'asse esterno. Se non c'è asse esterno, gli ultimi due non devono essere modificati.
4. I dati su misura possono essere chiamati nel programma RAPIDO.
13. Una risoluzione dei problemi di 6 errori comuni nella riparazione del servomotore del robot di ABB
1. Come trattare l'errore di straripamento del contatore di errore del motore durante la rotazione ad alta velocità?
L'errore di straripamento del contatore di errore del motore si presenta durante la rotazione ad alta velocità.
Contromisure 1: Controlli se i collegamenti del cavo elettrico del motore e del cavo del codificatore sono corretti e se il cavo è danneggiato.
L'errore di straripamento del contatore di errore del motore accade quando introduce un impulso lungo di comando.
L'errore di straripamento del contatore di errore del motore si è presentato durante il funzionamento.
Contromisure 2: Aumenti il valore di regolazione del livello di straripamento del contatore di errore; Rallenti la velocità di rotazione; Estenda il tempo di decelerazione e di accelerazione; Il carico è troppo pesante ed è necessario da selezionare un motore della più grande capacità da zero o da ridurre il carico ed installa le organizzazioni della trasmissione quali i riduttori per aumentare il carico.
2. Che cosa dovrebbe essere fatto se non funziona quando c'è uscita di impulso?
Sorvegli il valore corrente dell'uscita di impulso del regolatore e se la luce dell'uscita di impulso sta infiammando, riconosca che l'impulso di comando è stato compiuto normalmente ed ora sta producendo;
Controlli se il cavo di controllo, il cavo elettrico ed il cavo del codificatore dal regolatore al driver sono fissati in modo errato, nocivo, o in contatto difficile;
Controlli se il freno del servomotore con il freno ora è stato aperto;
Sorvegli se il pannello di servo driver riconosce l'input dei comandi di impulso;
Il comando funzionato dell'operazione è normale;
La forma di controllo deve scegliere la forma di controllo direzionale;
È il tipo di impulso di input messo dal servo driver coerente con la regolazione dell'impulso di comando;
Assicuri che il lato che positivo l'azionamento è interrotto, il segnale di arresto di rotazione dell'azionamento del lato di rotazione ed il contro segnale risistemato di errore non sia introdotto, il carico è staccato e l'operazione a vuoto è normale. Controlli il sistema meccanico.
3. Che cosa dovrei fare se non c'è rapporto di sovraccarico con il carico?
Se accade quando il servo segnale funzionato è collegato e nessun impulso è emesso:
Controlli i collegamenti del cavo elettrico del servomotore per vedere se c'è del danno difficile del cavo o del contatto; Se è un servomotore con un freno, il freno deve essere acceso; È il guadagno del ciclo della velocità ha messo troppo alto; È la costante di tempo integrale del ciclo della velocità ha messo troppo piccolo.
Se le servo sole disfunzioni durante il funzionamento:
È il guadagno del circuito di azimut ha messo troppo alto; È l'ampiezza di posizionamento del completamento ha messo troppo piccolo; Controlli se non c'è rotore bloccato sull'asse del servomotore e regoli il macchinario da zero.
4. Come occuparsi dei suoni o delle vibrazioni anormali durante il funzionamento?
Servo collegamenti:
Usi i cavi elettrici standardizzati, i cavi del codificatore, i cavi di controllo ed i cavi per controllare per vedere se c'è danno; Controlli se ci sono fonti di interferenza vicino alla linea di controllo e se sono paralleli o troppo vicini ai cavi elettrici a corrente forte vicini; Controlli se c'è del cambiamento nel potenziale del terminale di messa a terra di assicurare la messa a terra eccellente.
Servo parametri:
La servo regolazione di guadagno è troppo grande ed è raccomandato a manualmente o attivamente regola i servo parametri da zero; Riconoscendo la regolazione della costante di tempo del filtro da risposta della velocità, con un valore iniziale di 0, è possibile aumentare il valore stabilito provando; La regolazione elettronica del rapporto di marce è troppo grande, sostenendo per ristabilire alle regolazioni della fabbrica; Risonanza fra il servo sistema ed il sistema meccanico, verificanti e regolanti frequenza ed ampiezza del filtro da tacca.
Sistema meccanico:
L'accoppiamento che collega l'asse del motore ed il sistema dell'attrezzatura ha deviato e le viti dell'installazione non sono state strette; L'impegno difficile delle pulegge o degli ingranaggi può anche condurre ai cambiamenti nella coppia di torsione del carico. Operazione a vuoto della prova. Se a vuoto l'operazione è normale, controllo se c'è dell'anomalia nella parte legante del sistema meccanico; Ammetta se l'inerzia, la coppia di torsione e la velocità del carico sono troppo grande, prova l'operazione a vuoto e se l'operazione a vuoto è normale, riduca il carico o sostituisca il driver ed il motore con una più grande capacità.
5. Come trattare il controllo inesatto di orientamento e posizionamento durante la riparazione del servomotore del robot di ABB?
In primo luogo, riconosca se il valore dichiarato reale di impulso del regolatore è coerente con il valore previsto e se non, controlli e corregga il programma;
Sorvegli se il numero dei comandi di impulso ricevuti dal servo driver abbina quello annunciato dal regolatore. Se non, controllo il cavo di controllo; Controlli se la regolazione di servo forma di impulso di comando è coerente con la regolazione del regolatore, quali CW/CCW o pulse+direction;
La servo regolazione di guadagno è troppo grande, prego manualmente o attivamente regola il servo guadagno da zero; Il servomotore è ad errori accumulati inclini durante il moto alternativo. È raccomandato per mettere un segnale meccanico di origine nelle circostanze permesse tramite il processo e realizza l'operazione di ricerca di origine prima che l'errore superi la scala permessa; Il sistema meccanico stesso ha l'accuratezza bassa o organizzazione anormale della trasmissione (quale deviazione dell'accoppiamento fra il servomotore ed il sistema dell'attrezzatura).
6. la riparazione del servomotore del robot di ABB, l'operazione di controllo direzionale, errore dell'eccesso di velocità ha riferito. Come trattarla?
Non appena il servo segnale funzionato è collegato, avvierà: controlli se i collegamenti del cavo elettrico del servomotore e del cavo del codificatore sono corretti ed intatti.
14. Come fanno i robot industriali di ABB subiscono la manutenzione programmata?
Prima dell'operazione normale «dell'ispezione del freno», è necessario da controllare il freno del motore di ogni asse. Il metodo di ispezione per il freno del motore è come segue:
1. funzionamento l'asse di ogni braccio robot alla sua posizione del carico massimo.
2. giro il accendere di selezione modi di funzionamento del motore il regolatore del robot alla posizione di riposo dei MOTORI.
3. Controlli se l'asse è nella sua posizione originale. Se il braccio meccanico ancora mantiene la sua posizione dopo che il motore è spento, indica che il freno è in buone condizioni.
Il pericolo della funzione di perdita di operazione di decelerazione (250mm/s)
Non cambi il rapporto di marce o altri parametri di moto dal computer o dal pendente d'istruzione. Ciò colpirà la funzione dell'operazione della decelerazione (250mm/s).
15. Parecchi punti per prestare attenzione a quando usando i sussidi didattici sicuro:
Il bottone permettente del dispositivo installato sul pendente d'istruzione, una volta urgente a metà strada, cambia il sistema ai MOTORI sul modo. Quando il bottone è liberato o completamente è premuto, i cambiamenti di sistema ai MOTORI FUORI dal modo.
16. Per usare sicuro i sussidi didattici, i seguenti principi devono essere seguiti:
1.When il bottone permettente del dispositivo non può perdere la sua funzione durante la programmazione o l'eliminazione degli errori ed il robot non deve muoversi, immediatamente liberare il bottone permettente del dispositivo.
2. Quando il personale di programmazione entra in un'area sicura, devono portare sempre il pendente d'istruzione sul loro corpo per impedire altri muovere il robot.
17. Nel lavorare all'interno della gamma di lavoro del braccio robot, i seguenti punti devono essere osservati:
1. Il commutatore di selezione modi di funzionamento il regolatore deve essere acceso nella posizione manuale per fare funzionare il dispositivo permettente per staccare il computer o per funzionare a distanza;
2. Quando il commutatore di selezione modi di funzionamento è sopra
3. attenzione di paga all'asse di rotazione del braccio robot, stare attento quando i capelli o l'abbigliamento ottengono confusi. Inoltre, attenzione di paga ad altri componente selezionati o attrezzatura sul braccio robot;
4. Controlli il freno del motore di ogni asse.
18. Deviazione di tocco
Fenomeno 1: La posizione commovente dalle dita non coincide con la freccia del topo.
Ragione: Dopo l'installazione del programma del driver, il pendente d'istruzione non ha toccato verticalmente il centro della posizione del centro durante la calibratura.
Soluzione: Ricalibri la posizione.
Fenomeno 2: Alcune aree hanno tocco accurato, mentre altre hanno deviazione in tocco.
Causa: Un gran numero di polvere o di scala si accumula sulle bande acustiche della riflessione intorno al touch screen dell'onda acustica di superficie, che colpisce la trasmissione dei segnali acustici.
Soluzione: Pulisca il touch screen, prestante l'attenzione speciale a pulire le bande della riflessione dell'onda sonora da tutti i lati del touch screen. Nel pulire, stacchi l'alimentazione elettrica della scheda di controllo del touch screen.
19. Tocco d'istruzione del pendente nessuna risposta
Fenomeno: Nel toccare lo schermo, le frecce del topo non si muovono e non c'è cambiamento nella posizione.
Ragione: Ci sono molte ragioni per questo fenomeno, come segue:
1. La polvere o la scala accumulata sulle bande acustiche della riflessione intorno al touch screen dell'onda acustica di superficie è molto seria, inducendo il touch screen a non riuscire a lavorare;
2. disfunzione del touch screen;
3. La scheda di controllo del touch screen ha funzionato male;
4. Il segnale del touch screen ha funzionato male;
5. La porta seriale delle disfunzioni ospite;
6. Il sistema operativo del pendente d'istruzione ha funzionato male;
7. errore dell'installazione del driver di touch screen.
Soluzione: Osservi l'indicatore luminoso del segnale del touch screen, che infiamma regolarmente in circostanze normali, approssimativamente una volta al secondo.
Nel toccare lo schermo, il pendente d'istruzione va nero, che è un problema complesso. Se il risparmio di energia della lampadina è fissato, lo schermo nero è normale; Se la seconda parola nell'area di controllo del sistema è azionata casualmente, lo schermo inoltre andrà nero. Se i primi due punti si escludono, aggiornamento agli ultimi firmware per la rassegna.
Invii la vostra indagine direttamente noi

